
基于FPGA的SD卡音乐播放器之SD卡篇
目录
前言
这篇文章主要记录一下SD卡在该项目中的使用配置,用的是SPI接口。主要是关于SD卡的介绍、SD卡初始化、SD卡读操作。
提示:以下是本篇文章正文内容,均为作者本人原创,写文章实属不易,希望各位在转载时附上本文链接。
一、SD卡简介

二、SD卡特性
三、SD卡的class等级
存储器的class等级是一种很早就使用的标识,主要是标识存储卡的最低写入速度。
class后面的数字就代表了存储卡最低写入速度:
class 2 2MB/s
class 4 4MB/s
class 6 6MB/s
class 10 10MB/s
四、SD卡工作模式
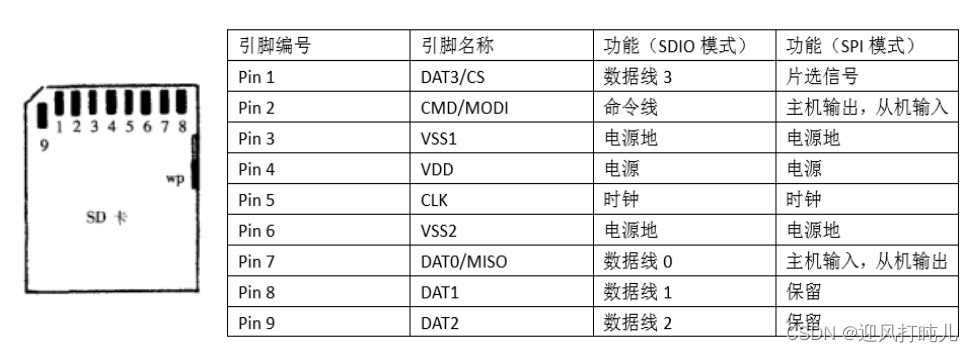
既然讲到了SD卡,那这里也得提一下TF卡。TF卡也就是MicroSD卡,是一种极细小的快闪存储器卡,是由SanDisk(闪迪)公司发明,主要用于移动手机。MicroSD卡插入适配器(Adapter)可以转换成SD卡,其操作时序和SD卡是一样的。MicroSD卡接口定义以及各引脚功能说明如图 3所示。

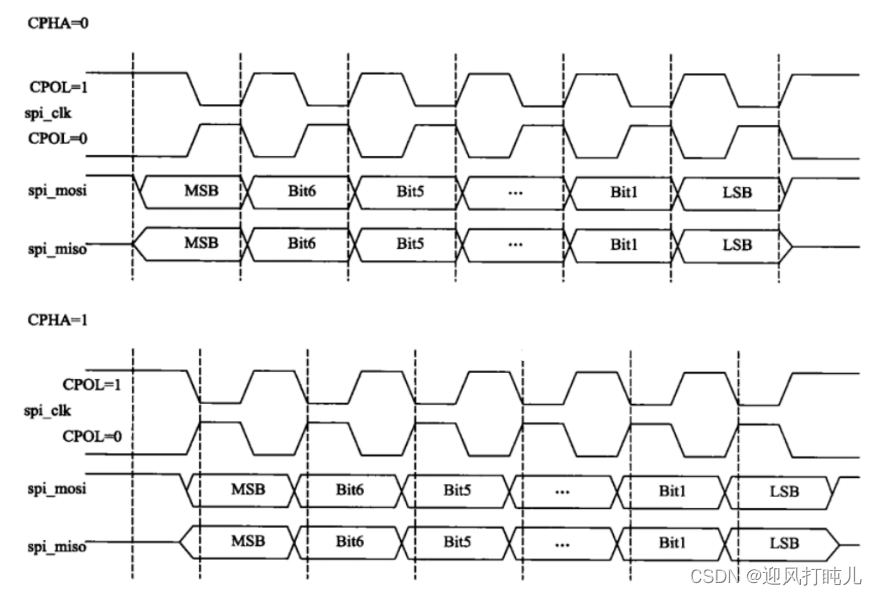
五、SD卡的SPI操作模式
六、SD卡命令分类
七、SD卡命令格式

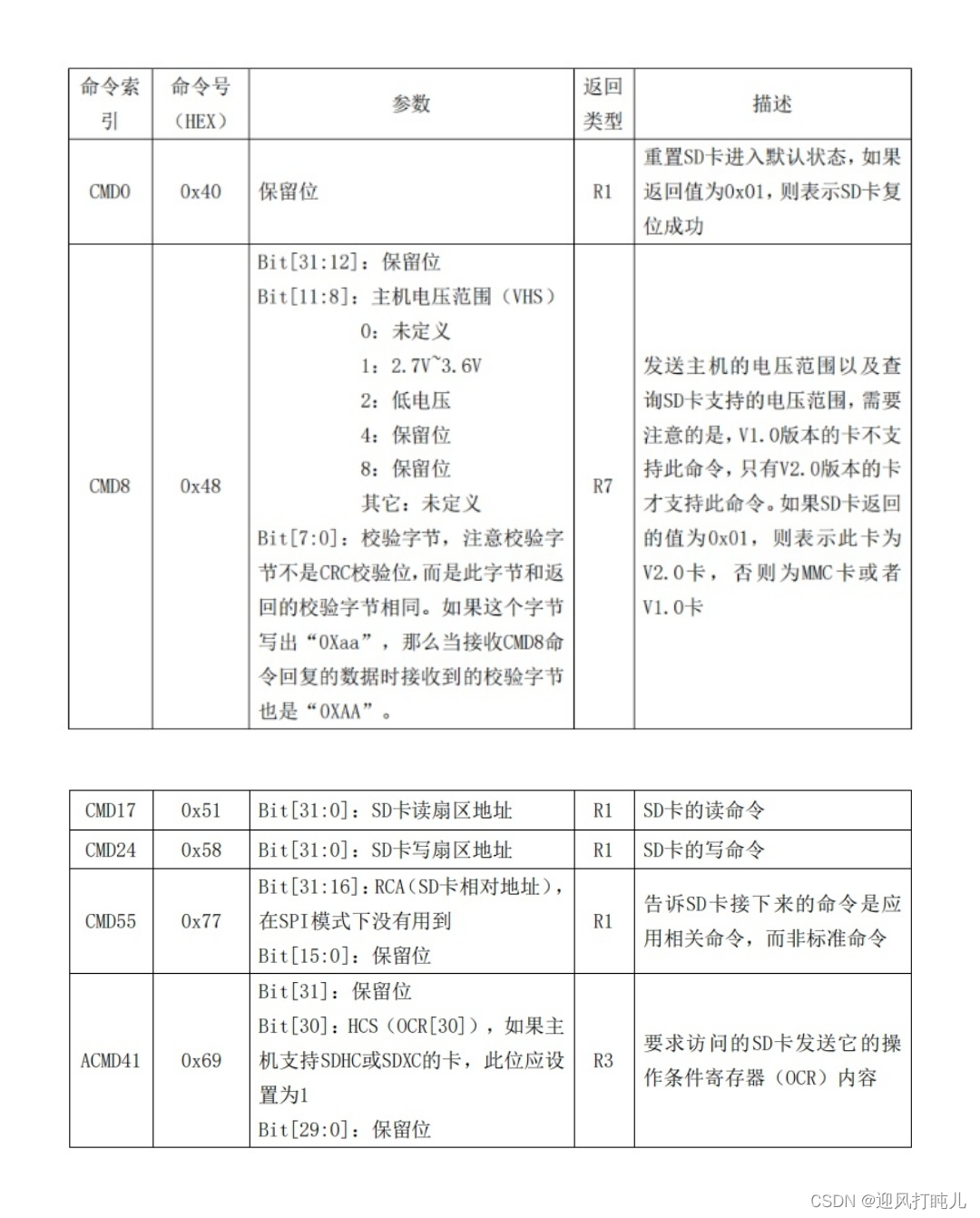
八、SD卡常用命令
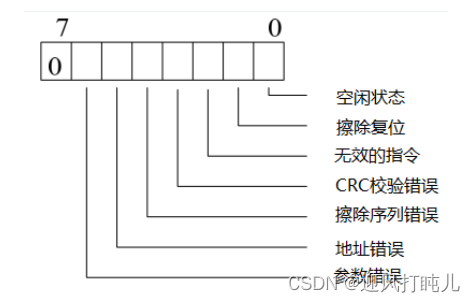
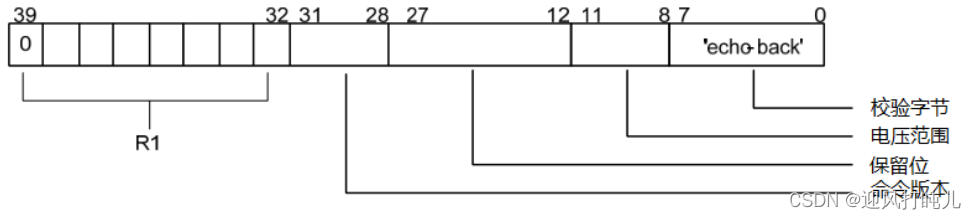
九、SD卡返回数据类型
SD卡返回类型R1数据格式如图7所示:

十、SD卡初始化
以下为用verilog语言编写的SD卡的初始化代码:
module sd_init(
input clk_ref , //时钟信号
input clk_ref_180deg, //时钟信号,与clk_ref相位相差180度
input rst_n , //复位信号,低电平有效
input sd_miso , //SD卡SPI串行输入数据信号
output sd_clk , //SD卡SPI时钟信号
output reg sd_cs , //SD卡SPI片选信号
output reg sd_mosi , //SD卡SPI串行输出数据信号
output reg sd_init_done //SD卡初始化完成信号
);
//parameter define
//SD卡软件复位命令,由于命令号及参数为固定值,CRC也为固定值,CRC = 8'h95
parameter CMD0 = {8'h40,8'h00,8'h00,8'h00,8'h00,8'h95};
//接口状态命令,发送主设备的电压范围,用于区分SD卡版本,只有2.0及以后的卡才支持CMD8命令
//MMC卡及V1.x的卡,不支持此命令,由于命令号及参数为固定值,CRC也为固定值,CRC = 8'h87
parameter CMD8 = {8'h48,8'h00,8'h00,8'h01,8'haa,8'h87};
//告诉SD卡接下来的命令是应用相关命令,而非标准命令, 不需要CRC
parameter CMD55 = {8'h77,8'h00,8'h00,8'h00,8'h00,8'hff};
//发送操作寄存器(OCR)内容, 不需要CRC
parameter ACMD41= {8'h69,8'h40,8'h00,8'h00,8'h00,8'hff};
//时钟分频系数,初始化SD卡时降低SD卡的时钟频率,50M/250K = 200
parameter DIV_FREQ = 200;
//上电至少等待74个同步时钟周期,在等待上电稳定期间,sd_cs = 1,sd_mosi = 1
parameter POWER_ON_NUM = 5000;
//发送软件复位命令时等待SD卡返回的最大时间,T = 100ms; 100_000us/4us = 25000
//当超时计数器等于此值时,认为SD卡响应超时,重新发送软件复位命令
parameter OVER_TIME_NUM = 25000;
parameter st_idle = 7'b000_0001; //默认状态,上电等待SD卡稳定
parameter st_send_cmd0 = 7'b000_0010; //发送软件复位命令
parameter st_wait_cmd0 = 7'b000_0100; //等待SD卡响应
parameter st_send_cmd8 = 7'b000_1000; //发送主设备的电压范围,检测SD卡是否满足
parameter st_send_cmd55 = 7'b001_0000; //告诉SD卡接下来的命令是应用相关命令
parameter st_send_acmd41 = 7'b010_0000; //发送操作寄存器(OCR)内容
parameter st_init_done = 7'b100_0000; //SD卡初始化完成
//reg define
reg [7:0] cur_state ;
reg [7:0] next_state ;
reg [7:0] div_cnt ; //分频计数器
reg div_clk ; //分频后的时钟
reg [12:0] poweron_cnt ; //上电等待稳定计数器
reg res_en ; //接收SD卡返回数据有效信号
reg [47:0] res_data ; //接收SD卡返回数据
reg res_flag ; //开始接收返回数据的标志
reg [5:0] res_bit_cnt ; //接收位数据计数器
reg [5:0] cmd_bit_cnt ; //发送指令位计数器
reg [15:0] over_time_cnt ; //超时计数器
reg over_time_en ; //超时使能信号
//wire define
wire div_clk_180deg ; //时钟相位和div_clk相差180度
assign sd_clk = ~div_clk; //SD_CLK
assign div_clk_180deg = ~div_clk; //相位和DIV_CLK相差180度的时钟
//时钟分频,div_clk = 250KHz
always @(posedge clk_ref or negedge rst_n) begin
if(!rst_n) begin
div_clk <= 1'b0;
div_cnt <= 8'd0;
end
else begin
if(div_cnt == DIV_FREQ/2-1'b1) begin
div_clk <= ~div_clk;
div_cnt <= 8'd0;
end
else
div_cnt <= div_cnt + 1'b1;
end
end
//上电等待稳定计数器
always @(posedge div_clk or negedge rst_n) begin
if(!rst_n)
poweron_cnt <= 13'd0;
else if(cur_state == st_idle) begin
if(poweron_cnt < POWER_ON_NUM)
poweron_cnt <= poweron_cnt + 1'b1;
end
else
poweron_cnt <= 13'd0;
end
//接收sd卡返回的响应数据
//在div_clk_180deg(sd_clk)的上升沿锁存数据
always @(posedge div_clk_180deg or negedge rst_n) begin
if(!rst_n) begin
res_en <= 1'b0;
res_data <= 48'd0;
res_flag <= 1'b0;
res_bit_cnt <= 6'd0;
end
else begin
//sd_miso = 0 开始接收响应数据
if(sd_miso == 1'b0 && res_flag == 1'b0) begin
res_flag <= 1'b1;
res_data <= {res_data[46:0],sd_miso};
res_bit_cnt <= res_bit_cnt + 6'd1;
res_en <= 1'b0;
end
else if(res_flag) begin
//R1返回1个字节,R3 R7返回5个字节
//在这里统一按照6个字节来接收,多出的1个字节为NOP(8个时钟周期的延时)
res_data <= {res_data[46:0],sd_miso};
res_bit_cnt <= res_bit_cnt + 6'd1;
if(res_bit_cnt == 6'd47) begin
res_flag <= 1'b0;
res_bit_cnt <= 6'd0;
res_en <= 1'b1;
end
end
else
res_en <= 1'b0;
end
end
always @(posedge div_clk or negedge rst_n) begin
if(!rst_n)
cur_state <= st_idle;
else
cur_state <= next_state;
end
always @(*) begin
next_state = st_idle;
case(cur_state)
st_idle : begin
//上电至少等待74个同步时钟周期
if(poweron_cnt == POWER_ON_NUM) //默认状态,上电等待SD卡稳定
next_state = st_send_cmd0;
else
next_state = st_idle;
end
st_send_cmd0 : begin //发送软件复位命令
if(cmd_bit_cnt == 6'd47)
next_state = st_wait_cmd0;
else
next_state = st_send_cmd0;
end
st_wait_cmd0 : begin //等待SD卡响应
if(res_en) begin //SD卡返回响应信号
if(res_data[47:40] == 8'h01) //SD卡返回复位成功
next_state = st_send_cmd8;
else
next_state = st_idle;
end
else if(over_time_en) //SD卡响应超时
next_state = st_idle;
else
next_state = st_wait_cmd0;
end
//发送主设备的电压范围,检测SD卡是否满足
st_send_cmd8 : begin
if(res_en) begin //SD卡返回响应信号
//返回SD卡的操作电压,[19:16] = 4'b0001(2.7V~3.6V)
if(res_data[19:16] == 4'b0001)
next_state = st_send_cmd55;
else
next_state = st_idle;
end
else
next_state = st_send_cmd8;
end
//告诉SD卡接下来的命令是应用相关命令
st_send_cmd55 : begin
if(res_en) begin //SD卡返回响应信号
if(res_data[47:40] == 8'h01) //SD卡返回空闲状态
next_state = st_send_acmd41;
else
next_state = st_send_cmd55;
end
else
next_state = st_send_cmd55;
end
st_send_acmd41 : begin //发送操作寄存器(OCR)内容
if(res_en) begin //SD卡返回响应信号
if(res_data[47:40] == 8'h00) //初始化完成信号
next_state = st_init_done;
else
next_state = st_send_cmd55; //初始化未完成,重新发起
end
else
next_state = st_send_acmd41;
end
st_init_done : next_state = st_init_done; //初始化完成
default : next_state = st_idle;
endcase
end
//SPI模式中SD卡在div_clk_180deg(sd_clk)的上升沿锁存数据,因此在sd_clk的下降沿输出数据
//为了统一在alway块中使用上升沿触发,此处使用和sd_clk相位相差180度的时钟
always @(posedge div_clk or negedge rst_n) begin
if(!rst_n) begin
sd_cs <= 1'b1;
sd_mosi <= 1'b1;
sd_init_done <= 1'b0;
cmd_bit_cnt <= 6'd0;
over_time_cnt <= 16'd0;
over_time_en <= 1'b0;
end
else begin
over_time_en <= 1'b0;
case(cur_state)
st_idle : begin //默认状态,上电等待SD卡稳定
sd_cs <= 1'b1; //在等待上电稳定期间,sd_cs=1
sd_mosi <= 1'b1; //sd_mosi=1
end
st_send_cmd0 : begin //发送CMD0软件复位命令
cmd_bit_cnt <= cmd_bit_cnt + 6'd1;
sd_cs <= 1'b0;
sd_mosi <= CMD0[6'd47 - cmd_bit_cnt]; //先发送CMD0命令高位
if(cmd_bit_cnt == 6'd47)
cmd_bit_cnt <= 6'd0;
end
//在接收CMD0响应返回期间,片选CS拉低,进入SPI模式
st_wait_cmd0 : begin
sd_mosi <= 1'b1;
if(res_en) //SD卡返回响应信号
//接收完成之后再拉高,进入SPI模式
sd_cs <= 1'b1;
over_time_cnt <= over_time_cnt + 1'b1; //超时计数器开始计数
//SD卡响应超时,重新发送软件复位命令
if(over_time_cnt == OVER_TIME_NUM - 1'b1)
over_time_en <= 1'b1;
if(over_time_en)
over_time_cnt <= 16'd0;
end
st_send_cmd8 : begin //发送CMD8
if(cmd_bit_cnt<=6'd47) begin
cmd_bit_cnt <= cmd_bit_cnt + 6'd1;
sd_cs <= 1'b0;
sd_mosi <= CMD8[6'd47 - cmd_bit_cnt]; //先发送CMD8命令高位
end
else begin
sd_mosi <= 1'b1;
if(res_en) begin //SD卡返回响应信号
sd_cs <= 1'b1;
cmd_bit_cnt <= 6'd0;
end
end
end
st_send_cmd55 : begin //发送CMD55
if(cmd_bit_cnt<=6'd47) begin
cmd_bit_cnt <= cmd_bit_cnt + 6'd1;
sd_cs <= 1'b0;
sd_mosi <= CMD55[6'd47 - cmd_bit_cnt];
end
else begin
sd_mosi <= 1'b1;
if(res_en) begin //SD卡返回响应信号
sd_cs <= 1'b1;
cmd_bit_cnt <= 6'd0;
end
end
end
st_send_acmd41 : begin //发送ACMD41
if(cmd_bit_cnt <= 6'd47) begin
cmd_bit_cnt <= cmd_bit_cnt + 6'd1;
sd_cs <= 1'b0;
sd_mosi <= ACMD41[6'd47 - cmd_bit_cnt];
end
else begin
sd_mosi <= 1'b1;
if(res_en) begin //SD卡返回响应信号
sd_cs <= 1'b1;
cmd_bit_cnt <= 6'd0;
end
end
end
st_init_done : begin //初始化完成
sd_init_done <= 1'b1;
sd_cs <= 1'b1;
sd_mosi <= 1'b1;
end
default : begin
sd_cs <= 1'b1;
sd_mosi <= 1'b1;
end
endcase
end
end
endmodule十 一、SD卡读操作
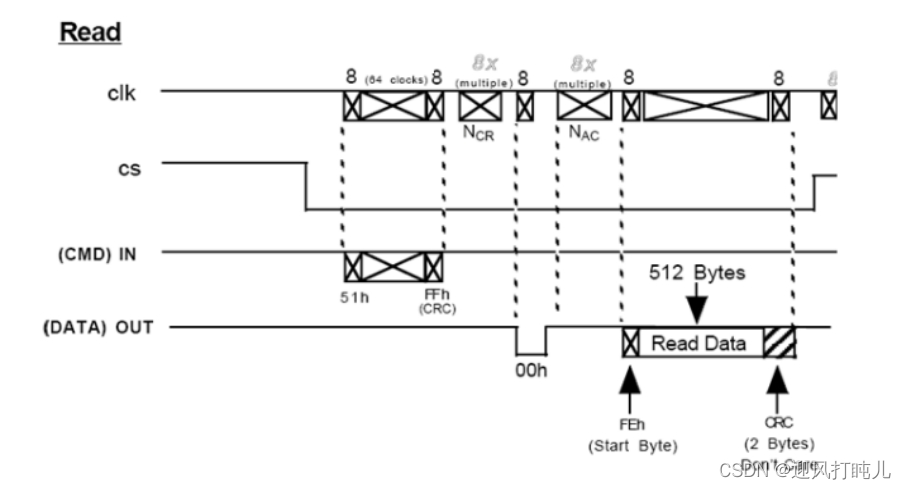
以下为用verilog语言编写的SD卡的读操作代码:
module sd_read(
input clk_ref , //时钟信号
input clk_ref_180deg, //时钟信号,与clk_ref相位相差180度
input rst_n , //复位信号,低电平有效
//SD卡接口
input sd_miso , //SD卡SPI串行输入数据信号
output reg sd_cs , //SD卡SPI片选信号
output reg sd_mosi , //SD卡SPI串行输出数据信号
//用户读接口
input rd_start_en , //开始读SD卡数据信号
input [31:0] rd_sec_addr , //读数据扇区地址
output reg rd_busy , //读数据忙信号
output reg rd_val_en , //读数据有效信号
output reg [15:0] rd_val_data //读数据
);
//reg define
reg rd_en_d0 ; //rd_start_en信号延时打拍
reg rd_en_d1 ;
reg res_en ; //接收SD卡返回数据有效信号
reg [7:0] res_data ; //接收SD卡返回数据
reg res_flag ; //开始接收返回数据的标志
reg [5:0] res_bit_cnt ; //接收位数据计数器
reg rx_en_t ; //接收SD卡数据使能信号
reg [15:0] rx_data_t ; //接收SD卡数据
reg rx_flag ; //开始接收的标志
reg [3:0] rx_bit_cnt ; //接收数据位计数器
reg [8:0] rx_data_cnt ; //接收的数据个数计数器
reg rx_finish_en ; //接收完成使能信号
reg [3:0] rd_ctrl_cnt ; //读控制计数器
reg [47:0] cmd_rd ; //读命令
reg [5:0] cmd_bit_cnt ; //读命令位计数器
reg rd_data_flag ; //准备读取数据的标志
//wire define
wire pos_rd_en ; //开始读SD卡数据信号的上升沿
assign pos_rd_en = (~rd_en_d1) & rd_en_d0;
//rd_start_en信号延时打拍
always @(posedge clk_ref or negedge rst_n) begin
if(!rst_n) begin
rd_en_d0 <= 1'b0;
rd_en_d1 <= 1'b0;
end
else begin
rd_en_d0 <= rd_start_en;
rd_en_d1 <= rd_en_d0;
end
end
//接收sd卡返回的响应数据
//在clk_ref_180deg(sd_clk)的上升沿锁存数据
always @(posedge clk_ref_180deg or negedge rst_n) begin
if(!rst_n) begin
res_en <= 1'b0;
res_data <= 8'd0;
res_flag <= 1'b0;
res_bit_cnt <= 6'd0;
end
else begin
//sd_miso = 0 开始接收响应数据
if(sd_miso == 1'b0 && res_flag == 1'b0) begin
res_flag <= 1'b1;
res_data <= {res_data[6:0],sd_miso};
res_bit_cnt <= res_bit_cnt + 6'd1;
res_en <= 1'b0;
end
else if(res_flag) begin
res_data <= {res_data[6:0],sd_miso};
res_bit_cnt <= res_bit_cnt + 6'd1;
if(res_bit_cnt == 6'd7) begin
res_flag <= 1'b0;
res_bit_cnt <= 6'd0;
res_en <= 1'b1;
end
end
else
res_en <= 1'b0;
end
end
//接收SD卡有效数据
//在clk_ref_180deg(sd_clk)的上升沿锁存数据
always @(posedge clk_ref_180deg or negedge rst_n) begin
if(!rst_n) begin
rx_en_t <= 1'b0;
rx_data_t <= 16'd0;
rx_flag <= 1'b0;
rx_bit_cnt <= 4'd0;
rx_data_cnt <= 9'd0;
rx_finish_en <= 1'b0;
end
else begin
rx_en_t <= 1'b0;
rx_finish_en <= 1'b0;
//数据头0xfe 8'b1111_1110,所以检测0为起始位
if(rd_data_flag && sd_miso == 1'b0 && rx_flag == 1'b0)
rx_flag <= 1'b1;
else if(rx_flag) begin
rx_bit_cnt <= rx_bit_cnt + 4'd1;
rx_data_t <= {rx_data_t[14:0],sd_miso};
if(rx_bit_cnt == 4'd15) begin
rx_data_cnt <= rx_data_cnt + 9'd1;
//接收单个BLOCK共512个字节 = 256 * 16bit
if(rx_data_cnt <= 9'd255)
rx_en_t <= 1'b1;
else if(rx_data_cnt == 9'd257) begin //接收两个字节的CRC校验值
rx_flag <= 1'b0;
rx_finish_en <= 1'b1; //数据接收完成
rx_data_cnt <= 9'd0;
rx_bit_cnt <= 4'd0;
end
end
end
else
rx_data_t <= 16'd0;
end
end
//寄存输出数据有效信号和数据
always @(posedge clk_ref or negedge rst_n) begin
if(!rst_n) begin
rd_val_en <= 1'b0;
rd_val_data <= 16'd0;
end
else begin
if(rx_en_t) begin
rd_val_en <= 1'b1;
rd_val_data <= rx_data_t;
end
else
rd_val_en <= 1'b0;
end
end
//读命令
always @(posedge clk_ref or negedge rst_n) begin
if(!rst_n) begin
sd_cs <= 1'b1;
sd_mosi <= 1'b1;
rd_ctrl_cnt <= 4'd0;
cmd_rd <= 48'd0;
cmd_bit_cnt <= 6'd0;
rd_busy <= 1'b0;
rd_data_flag <= 1'b0;
end
else begin
case(rd_ctrl_cnt)
4'd0 : begin
rd_busy <= 1'b0;
sd_cs <= 1'b1;
sd_mosi <= 1'b1;
if(pos_rd_en) begin
cmd_rd <= {8'h51,rd_sec_addr,8'hff}; //写入单个命令块CMD17
rd_ctrl_cnt <= rd_ctrl_cnt + 4'd1; //控制计数器加1
//开始执行读取数据,拉高读忙信号
rd_busy <= 1'b1;
end
end
4'd1 : begin
if(cmd_bit_cnt <= 6'd47) begin //开始按位发送读命令
cmd_bit_cnt <= cmd_bit_cnt + 6'd1;
sd_cs <= 1'b0;
sd_mosi <= cmd_rd[6'd47 - cmd_bit_cnt]; //先发送高字节
end
else begin
sd_mosi <= 1'b1;
if(res_en) begin //SD卡响应
rd_ctrl_cnt <= rd_ctrl_cnt + 4'd1; //控制计数器加1
cmd_bit_cnt <= 6'd0;
end
end
end
4'd2 : begin
//拉高rd_data_flag信号,准备接收数据
rd_data_flag <= 1'b1;
if(rx_finish_en) begin //数据接收完成
rd_ctrl_cnt <= rd_ctrl_cnt + 4'd1;
rd_data_flag <= 1'b0;
sd_cs <= 1'b1;
end
end
default : begin
//进入空闲状态后,拉高片选信号,等待8个时钟周期
sd_cs <= 1'b1;
rd_ctrl_cnt <= rd_ctrl_cnt + 4'd1;
end
endcase
end
end
endmodule总结
以上就是此次要分享的全部内容,本文简单介绍了什么是SD卡以及如何在基于FPGA的SD卡音乐播放器工程中用硬件语言完成对SD卡的初始化和读操作。
版权声明:本文内容由互联网用户自发贡献,该文观点与技术仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请发送邮件至 dio@foxmail.com 举报,一经查实,本站将立刻删除。