
目录
计算机视觉
图像识别
用于识别图像中物体的类别(如:bottle、cup、cube)。
目标检测
用于检测图像中每个物体的类别,并准确标出它们的位置。
图像语义分割
用于标出图像中每个像素点所属的类别,属于同一类别的像素点用一个颜色标识。
实例分割
目标检测任务只需标注出物体位置,实例分割任务不仅要标注出物体位置,还需要标注出物体的外形轮廓。
cnn可以解决的问题
1)有效的将大数据量的图片降维成小数据量
2)有效的保留图片特征,符合图片处理原则
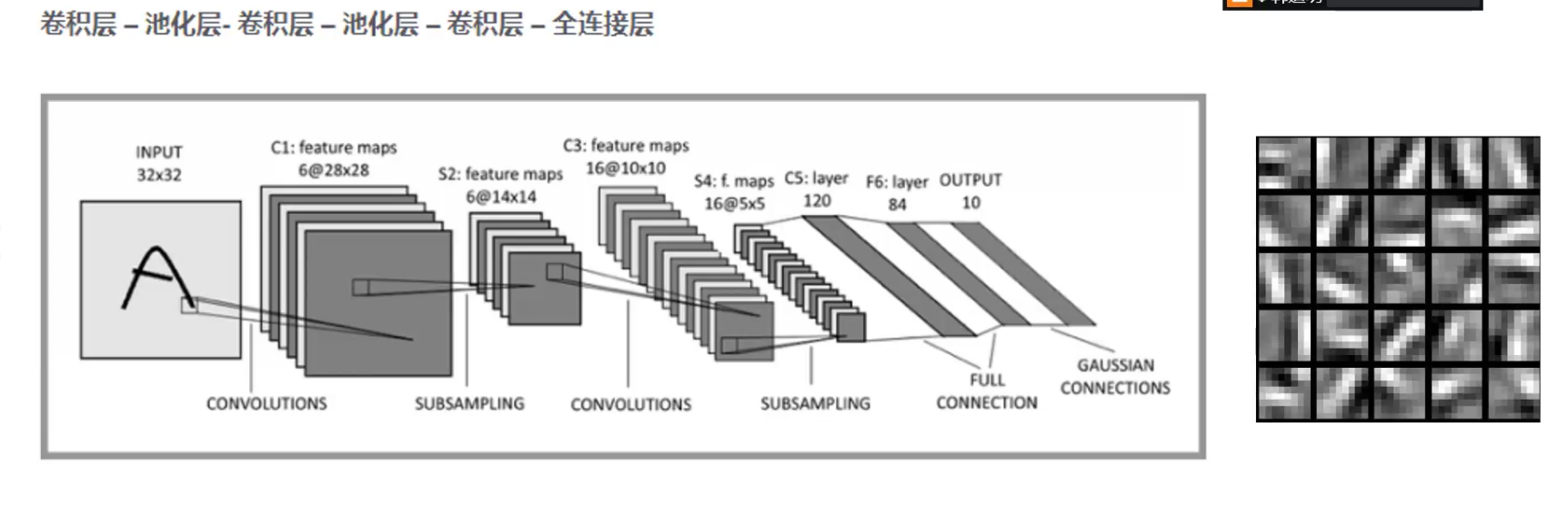
CNN五层网络结构
卷积神经网络,是一种专门用来处理具有类似网络结构的数据的神经网络。
数据输入层 Input
预处理,图像的像素矩阵。
卷积层 Convolution Layer
卷积层也叫过滤器、内核或卷积核。
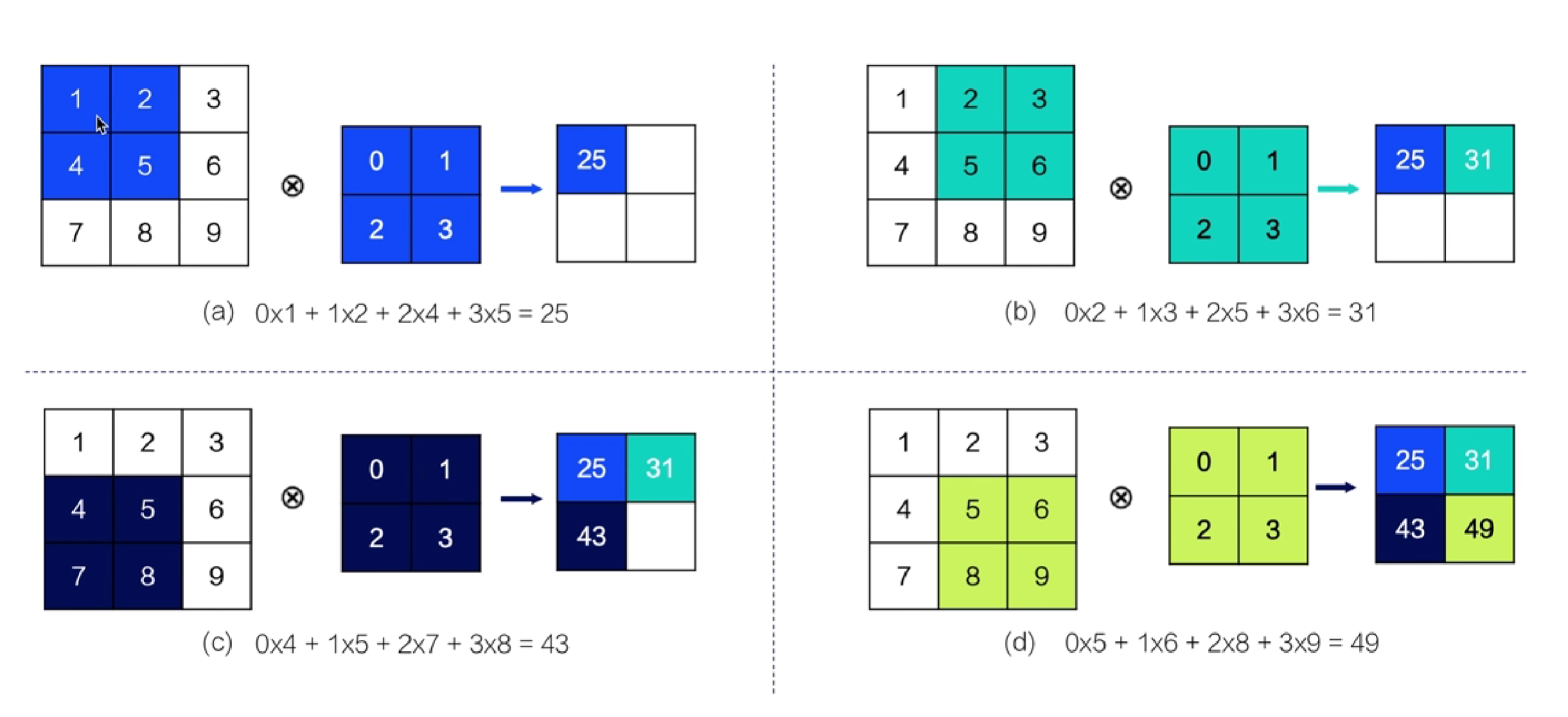
主要是对输入的图像和滤波矩阵(恒定的滤波器filter)做内积(逐个元素相乘再求和)的操作就是卷积。
卷积计算
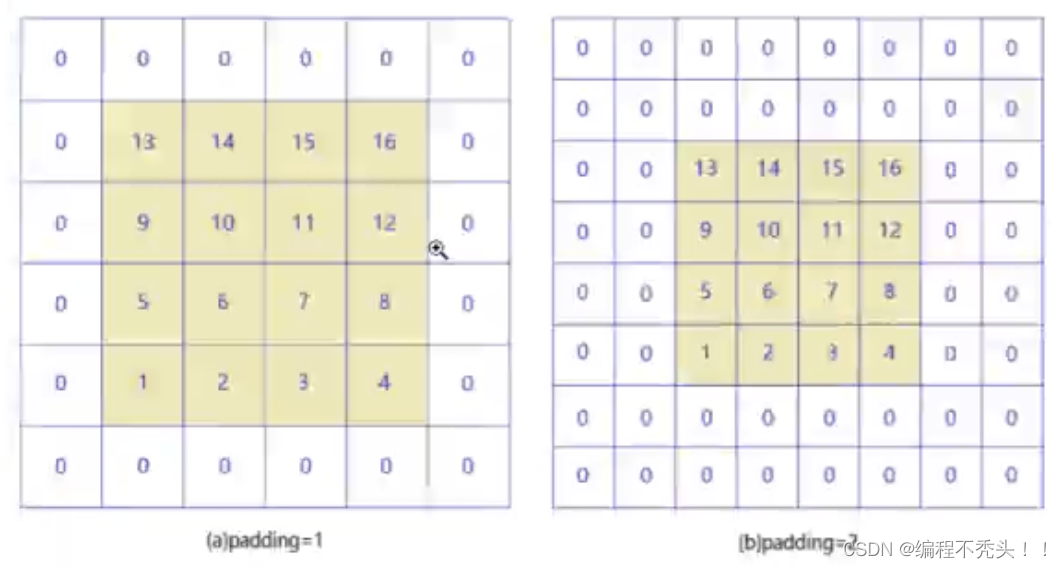
填充值 zero-padding(防止边缘图像的特征提取效果不佳)
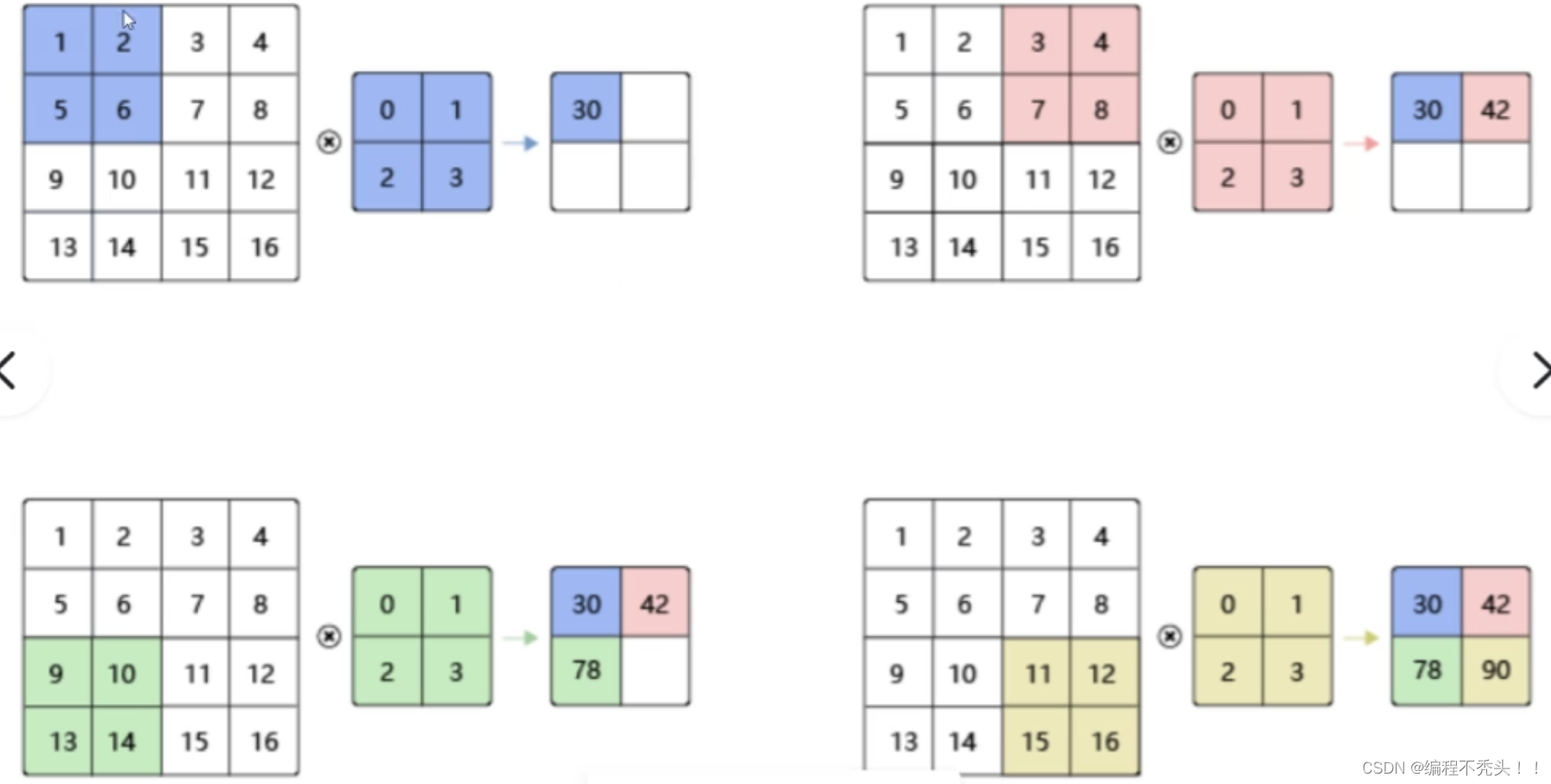
步幅 stride (减小输入参数的数目,减少计算量计算时像素移动两个位置)
卷积常用参数
- num_filters输出通道数目
- filter_size卷积核大小
- stride步幅
- padding填充大小
- act激活函数(作用在神经元上)
查看卷积层参数
- 查看参数conv.parameters()
- 查看权重名字和数值print(conv.parameters()[0].name,conv.parameters()[0].numpy())
- 查看偏置名字和数值print(conv.parameters()[1].name,conv.parameters()[1].numpy())
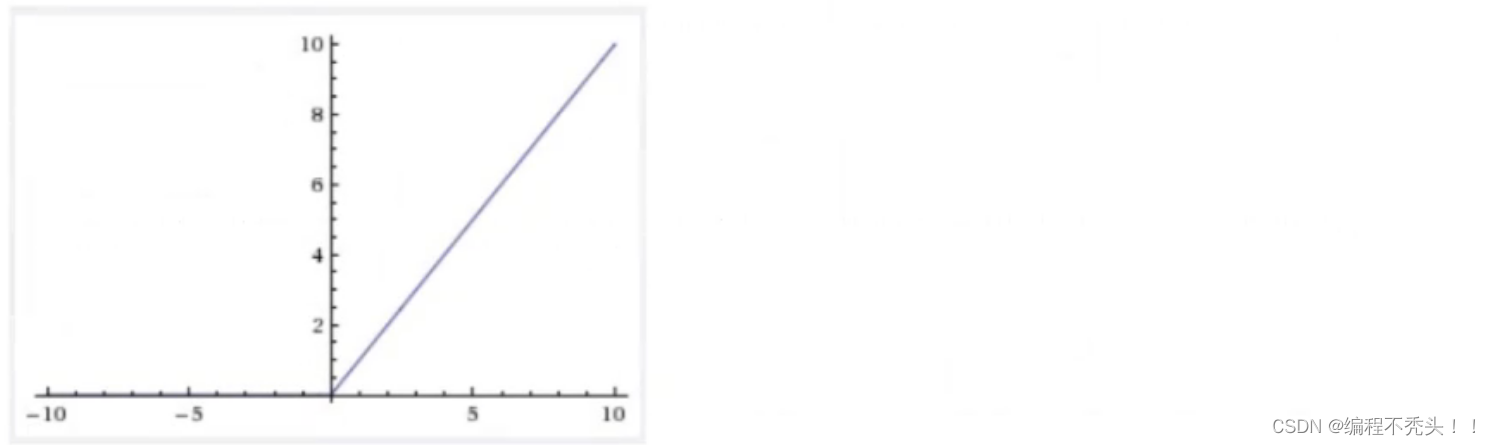
激活层 Relu
激活函数(加入非线性因素)
Relu激活函数

池化层 Pooling
概念:使用某一位置的相邻输出的总体统计特征来代替网络在该位置的输出
- 平均池化:在选中的像素中求平均值,来代表区域的统计特征
- 最大池化:在选中的像素中选择最大值,来代表区域的统计特征
目的
1)使特征图变小,简化网络计算复杂度
2)特征压缩,提取主要特征
3)加快计算速度
4)防止过拟合
5缩小最后全连接层中节点的个数,减少整个神经网络参数
参数
- 窗口大小pool_size=[kh,kw]
- 窗口滑动步幅pool_stride=[stride_h,stride_w]
- 图片填充padding=[ph,pw]
- 常见配置参数kh=kw=2,stride_h=stride_w=2,ph=pw=0(图片长宽减半)
全连接层 FC
总汇
版权声明:本文内容由互联网用户自发贡献,该文观点与技术仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请发送邮件至 dio@foxmail.com 举报,一经查实,本站将立刻删除。