
本篇文章节选自【机器谱资源网站】
《库房盘点机器人项目》
如需阅读其余文章
请点击 https://www.robotway.com/col.jsp?id=104
库房盘点机器人项目-概念
1. 需求概述
经调研发现,许多库房面临以下问题:
(1)盘库工作大部分由人工完成,工作量大、人力成本较高、出错概率高、频次低,无法保证时效性;
(2)取料任务对工作人员要求较高,效率较低,有一定出错风险,无法多人同时进行取料任务。
因此,本项目的目标是开发一种专用的库房管理机器人,提升库房自动化水平,解决当前的人工任务面临的问题。
2. 设计目标
本项目是针对中、大型物料库房设计的库房盘点机器人。适用于场地规则、路线标识清晰、货架摆放整齐、物料全部带有独立的RFID标签、有完善的出入库管理系统、有规范的管理流程的库房环境。
设计目标如下:
(1)提升工作效率
尽可能减少工作人员的工作量,简化人员工作流程,同时机器人可以不停机连续运转,在休息时间能进行部分的自主工作。
(2)节省管理精力
机器人可以通过网络接入库房原有管理系统,节省人工管理成本,也可以提供新的实时监控和工作日志,有效规避人为产生的错误和风险。
(3)降低人力成本
一次性投入的机器人可以有效地分担工作人员部分重复枯燥的工作,让现有人员可以把精力投入到更能创造价值的有效工作之中。
(4)保证较好的柔性和扩展性
机器人在设计过程中不应拘泥于固定不变的工作流程中,需要做到可配置、可调试、适应性强,以满足随时可能产生变化的真实需求,保证良好的柔性和扩展性。
(5)保证可靠性
机器人集成丰富的内部、外部传感器,实时监控自身工作状态和周围环境的变化,部分核心零部件适当冗余处理,保证尽可能不出错误,出现错误立即发现,发现错误立即停机上报。
(6)保证安全性
机器人在运行过程中需要保证周围协同工作的人员以及环境中物品设备的安全,从软件硬件多方面进行安全防护,运转安全高于一切工作任务。
3. 概念模型


4. 关键配置
本项目预计将使用Robodyno一体化机器人电机、激光雷达、高清摄像头、工控电脑等部件。
库房盘点机器人项目-0.1版
OSR002库房盘点机器人项目-0.1版-演示视频
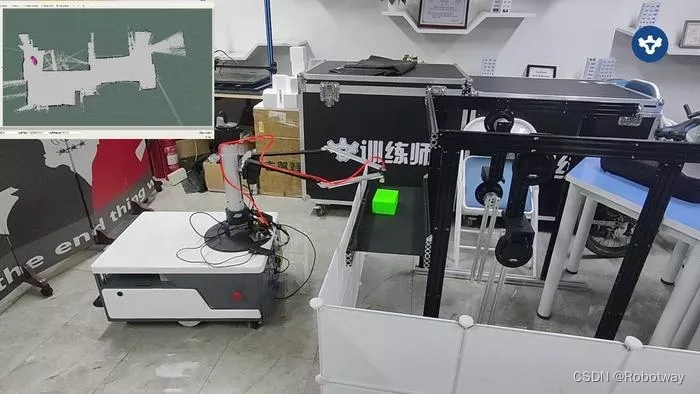
1. 成品图片

2. 构成说明
底盘:采用2驱动轮+4万向轮方案,robodyno一体化机器人电机驱动,可全向移动,底盘尺寸50cm×70cm×40cm,可载重100公斤以上。

激光雷达:16线激光雷达,探测距离120M,可完成全仓库地图构建及无线SLAM导航。
主控制器:人工智能高性能控制器,支持机器学习、人脸识别、激光SLAM等应用。
升降机构:丝杆升降,采用robodyno一体化机器人电机驱动,最高抬升高度50cm。

伸缩机构:二自由度并联机械臂,采用robodyno一体化机器人电机驱动,可完成平面内大范围运动,可配合RFID超高频扫描模块,完成仓库盘点。
气动搬运系统:气动吸嘴、气管、电磁阀等配件,可利用吸嘴获取工件,从而实现搬运。
双目视觉模块:通过双目视觉模块,可精准识别物料颜色、尺寸,距离等,并全程监控。
全航车载电脑:10.1寸多点触控电容屏,六核处理器,全航插车载电脑,可显示整机详细资料,例:电量、速度、任务进度等。
3. 演示功能说明
该机器人演示了以下功能:
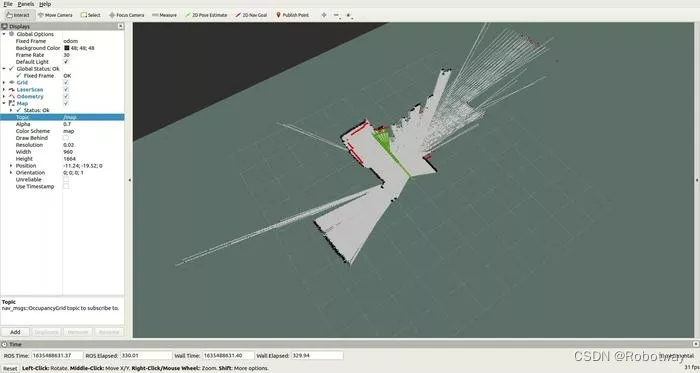
(1)可利用激光雷达构建库房地图;
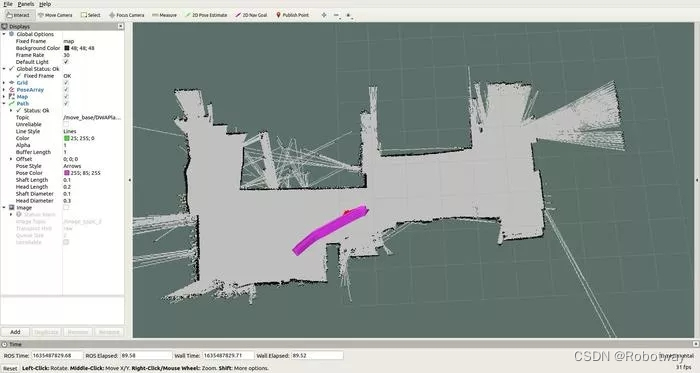
(2)机器人按照程序内预先写好的地点坐标,从出发点启动,自动导航至第一个点位(模拟仓储区);
(3)识别并拾取工件;

(4)自动导航至第二个点位(模拟加工区),放下工件;
(5)利用自动寻路算法沿最短路径回到出发点。

4. 开源资料说明
资料中包含两套ROS工作区文件夹。agv_ws中包含的是底盘运动及导航相关的ROS程序;demo_ws中包含的是demo 机械臂识别和抓取相关的ROS程序。
相应的ROS启动命令为:
roslaunch demo_controller demo.launch
5. 资料下载
| 资料内容 | OSR002库房盘点机器人0.1版-ROS源码 |
| 下载途径 | https://www.robotway.com/col.jsp?id=101 |
库房盘点机器人项目-0.2版
库房盘点机器人项目-0.2版
1. 成品图片

2. 版本说明
(1)0.2版拥有3个Robodyno Plus福来轮模组,构成三角形全向底盘,能更好适应狭窄的库房通道。

(2)机器人顶端安装了工作状态指示灯,可提高作业过程的安全性;

(3)升降机构的性能有了很大的提高,改进后的升降机构总行程约100cm,扫描高度范围为最低50cm~150cm,最高100cm~200cm;

双目视觉模块:通过双目视觉模块,可精准识别物料颜色、尺寸,距离等,并全程监控。

3. 详细参数
| 基本参数 |
雷达布局 |
前方单雷达 |
| 导航方式 |
激光SLAM |
|
| 外形尺寸(长*宽*高mm) |
630*500*260 |
|
| 自重(kg) |
60 |
|
| 最大检测高度(m) |
1~2(可定制) |
|
| 最大载重(kg) |
100 |
|
| 无线通信 |
2.4Ghz/5Ghz |
|
| 运动性能 |
最大速度(m/s) |
1 |
| 回转半径(mm) |
325 |
|
| 行走通道宽度(mm) |
Min 700 |
|
| 站点定位精度(mm) |
±10 |
|
| 精准对接精度(mm) |
±5 |
|
| 续航能力 |
续航时间(h) |
8 |
| 充电时间(h) |
4 |
|
| 充电方式 |
自动充电 |
|
| 电池容量 |
51.2V19Ah |
|
| 安全防护 |
雷达 |
前侧雷达 |
| 急停开关 |
左右两侧 |
|
| 警示灯 |
红/绿/黄 |
|
| 工作环境 |
工作温度(°) |
-20~50 |
| 工作湿度(%) |
5~95 |
|
| 空气环境 |
无粉尘、无易燃易爆、无腐蚀性气体 |
|
| 室内/室外 |
室内 |
4. 例程说明
以下为0.2版本机器人的基本运动例程(OSR002_0.2_run.py)。该例程实现的功能有:开机后升降复位,轮子使能,点亮绿灯;通过键盘可遥控机器人向各个方向行驶,并能遥控升降,如果出错了会亮红灯。请大家参考学习。

| 资料内容 | OSR002 库房盘点机器人0.2版 -例程 |
| 下载途径 | https://www.robotway.com/col.jsp?id=101 |
想了解更多机器人开源相关内容
请关注
机器人项目开源网站:https://www.robotway.com/
版权声明:本文内容由互联网用户自发贡献,该文观点与技术仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请发送邮件至 dio@foxmail.com 举报,一经查实,本站将立刻删除。