
信号保存与信号捕捉
一、信号保存
1. 信号的发送
那么在学习信号保存之前,我们先了解一下信号的发送,我们知道普通信号一共有31个,如下:
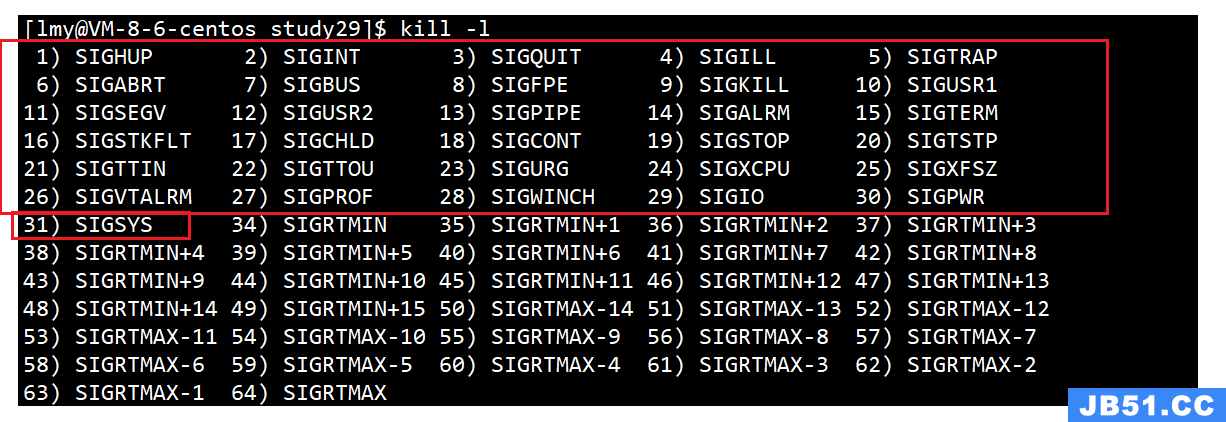
但是这个31就非常特殊,对于普通信号而言,对于进程而言,自己有还是没有收到哪一个信号。实际上,我们发送信号是给进程发,具体点就是给进程的 PCB 发,所以 task_struct 中必定有维护信号的字段,那么在 task_struct 中其实只需要维护一个整数即可,因为一个整数有 32 个比特位!而我们忽略第一位,从第2位开始到第32位一共31个比特位,就分别表示31种信号!也就是说,用0、1来描述信号,用位图管理普通信号!
所以,
- 比特位的内容是0还是1,表明是否收到;
- 比特位的位置(第几个),表示信号的编号;
- 所谓的发送信号,本质就是操作系统去修改 task_struct 的信号位图对应的比特位;
那么为什么必须是操作系统向进程PCB中写入呢?因为操作系统是进程的管理者,只有它有资格才能修改 task_struct 内部的属性!所以这就是为什么只有操作系统才能有资格给进程发信号!
2. 理解信号保存
(1)信号保存原因
信号为什么要保存呢?因为进程收到信号之后,可能不会立即处理这个信号,可能正在处理更重要的事情,所以信号不会被处理,就要有一个时间窗口,所以信号就要被保存。
(2)信号保存概念
- 实际执行信号的处理动作称为信号递达(Delivery);
- 信号从产生到递达之间的状态,称为信号未决(Pending);
- 进程可以选择阻塞 (Block )某个信号;
- 被阻塞的信号产生时将保持在未决状态,直到进程解除对此信号的阻塞,才执行递达的动作;
- 注意,阻塞和忽略是不同的,只要信号被阻塞就不会递达,而忽略是在递达之后可选的一种处理动作。
所以进程的 task_struct 中不仅要保存信号的状态,还要保存信号的阻塞状态;而且信号的范围是 1~31,每一种信号都要有自己的一种处理方法,所以在 task_struct 中还要为每一个信号维护一张 handler 表,这张表是函数指针数组,比如数组中的内容是 typedef void (*handler_t)(int); 类型,数组名为 handler_t handler[31];,所以它就是一个函数指针数组,里面放的就是指向方法的地址,而下标就是信号的编号!那么当我们捕捉对应信号后自定义的方法,就将我们的方法的地址填入对应的位置即可!如下图:
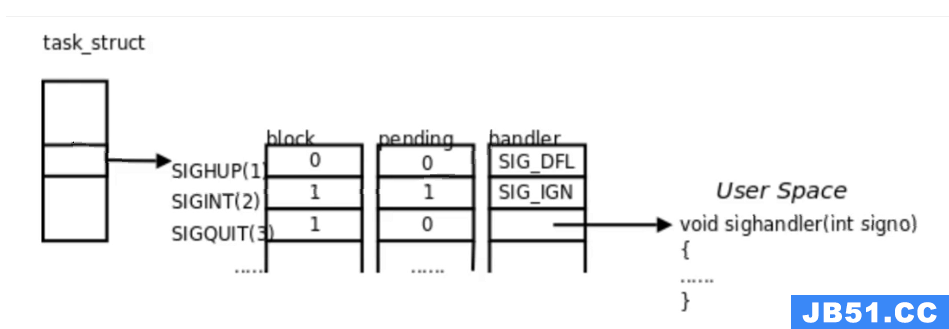
而上面的 pending 表就是一个位图,表示信号未决的状态;
那么 block 表也是一个位图,1表示被阻塞,0表示未阻塞。一旦阻塞了某个信号,在该信号没有被解除阻塞之前,即便收到了该信号,对应的信号也不会被操作系统进行递达。
所以 pending 表记录当前进程是否收到了信号以及收到了哪些信号;block 表记录特定信号是否被屏蔽;handler 表记录每种信号的处理方法。
所以对于某个信号,对应上面的三张表中,我们应该横向看,是否被屏蔽、是否收到、对应方法。所以我们对于信号的学习,无论给我们提供多少系统接口,都是围绕这三张表获取或者修改。
3. 信号保存系统接口
上面的两张表中,block 和 pending 是两张位图,也就是两个整数,我们当然可以用位操作去修改,但是整数都是32个比特位,而如果当操作系统想要扩展这两张位图的时候,一个整型就放不下了,所以操作系统给我们提供了一种用户层的类型,这个类型可以直接设置进操作系统的位图里。
而且上面的三张表都属于操作系统的内核数据结构,它不允许用户直接修改这三张表,所以操作系统必须给我们提供系统调用修改这三张表。我们要获取的 pending 表和 block 表都是位图,这就注定了要在用户空间到内核空间,内核空间到用户空间进行来回拷贝,所以数据拷贝时就要在系统调用接口的参数上设置输入输出型参数。
所以操作系统给我们提供了一种经过封装的数据类型,来获取内核中的位图,就是 sigset_t.
(1)sigset_t
sigset_t 其实就是一个位图结构,我们称为信号集。因此,未决和阻塞标志可以用相同的数据类型 sigset_t 来存储,sigset_t 称为信号集,这个类型可以表示每个信号的“有效”或“无效”状态,在阻塞信号集中“有效”和“无效”的含义是该信号是否被阻塞,而在未决信号集中“有效”和“无效”的含义是该信号是否处于未决状态。
sigset_t 类型对于每种信号用一个bit表示“有效”或“无效”状态,至于这个类型内部如何存储这些bit则依赖于系统实现,从使用者的角度是不必关心的,使用者只能调用以下函数来操作 sigset_t 变量,而不应该对它的内部数据做任何解释,比如用 printf 直接打印 sigset_t 变量是没有意义的。
#include <signal.h>
int sigemptyset(sigset_t *set); // 清空信号集
int sigfillset(sigset_t *set); // 将整个位图置1
int sigaddset (sigset_t *set,int signo); // 向指定信号集中添加指定信号
int sigdelset(sigset_t *set,int signo); // 在指定信号集中去掉指定信号
int sigismember(const sigset_t *set,int signo); // 判断指定信号是否在信号集中
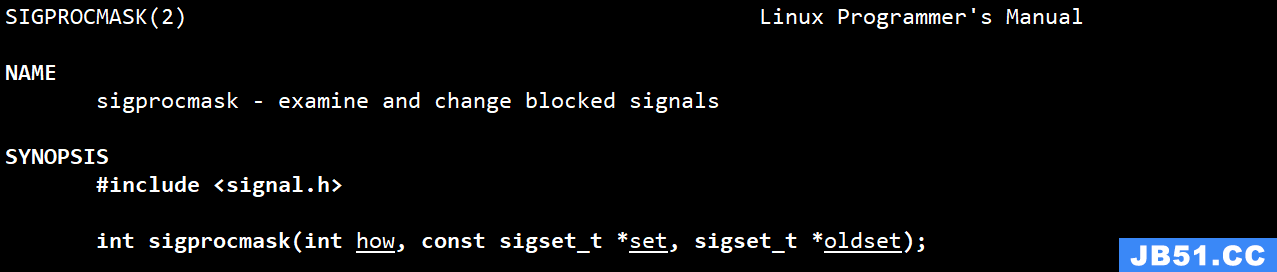
(2)sigprocmask()
调用函数 sigprocmask 可以读取或更改进程的信号屏蔽字(阻塞信号集),接口如下:
int sigprocmask(int how,const sigset_t *set,sigset_t *oldset);
其中第一个参数代表我们需要设置还是获取 block 表,有三个选项,如下,它们之间是并列关系,只能三选一:
- SIG_BLOCK:set 包含了我们希望添加到当前信号屏蔽字(block表)的信号,相当于 mask = mask | set;
- SIG_UNBLOCK:set 包含了我们希望从当前信号屏蔽字(block表)中解除阻塞的信号,相当于 mask = mask & ~set;
- SIG_SETMASK:设置当前信号屏蔽字(block表)为 set 所指向的值,相当于 mask = set;
第二个参数就是我们当前设置的信号集,它是一个输入型参数;第三个参数是一个输出型参数,当我们对进程的 block 表做修改的时候,在改之前,系统会将改之前的表通过 oldset 保存起来。那么修改之后,然后我们就能通过 oldset 拿到上一次的 block 表。 如果不需要的话可以设为 nullptr.
返回值则是成功返回0;失败返回-1.

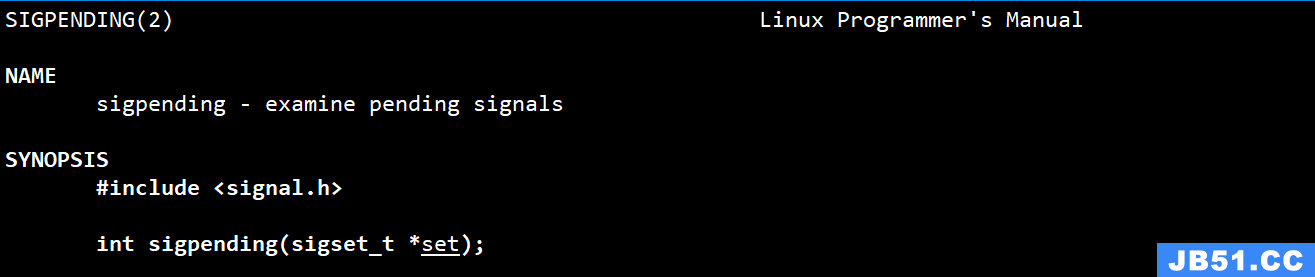
(3)sigpending()
读取当前进程的未决信号集,通过 set 参数传出。调用成功则返回0,出错则返回-1;接口如下:
int sigpending(sigset_t *set);
对于 sigpending 函数的唯一参数,它是一个输出型参数,就是调用进程所对应的 pending 表带出来。
(4)signal()
signal() 接口我们早就接触过了,它就是用来修改 handler 表的,接口如下:
typedef void (*sighandler_t)(int);
sighandler_t signal(int signum,sighandler_t handler);
(5)测试系统接口
下面我们写一个这样的代码:先将2号信号阻塞,然后打印出 pending 表,我们初始化的时候应该是全0的,然后我们给进程发送2号信号,因为2号信号被阻塞了,所以 pending 表中2号信号所对应的比特位在没有被解除阻塞前一直都是1的,然后我们打印 pending 表出来观察,是否如此。代码如下:
void Print(sigset_t sigset)
{
for(int i = 31; i >= 1; i--)
{
if(sigismember(&sigset,i))
{
cout << "1";
}
else
{
cout << "0";
}
}
cout << " pid: " << getpid() << endl;
}
int main()
{
sigset_t sigset;
sigemptyset(&sigset); // 信号集清0
sigaddset(&sigset,2); // 将2号信号的比特位设置为1
sigset_t oldsigset;
// 1. 屏蔽2号信号
sigprocmask(SIG_SETMASK,&sigset,&oldsigset);
while(1)
{
// 重复打印当前进程的 pending 表
int n = sigpending(&sigset);
if(n < 0) break;
Print(sigset);
sleep(1);
// 发送2号信号... kill -2 pid
}
return 0;
}
结果如下:

注意,9号和19号信号也是不可以被阻塞的!
二、信号捕捉处理
1. 信号的处理
我们在上面说过,信号保存是为了让进程在合适的时候处理,那么信号是什么时候被处理的呢?首先进程要处理一个信号,前提是要知道自己收到信号了,就必须得合适的时候去查 pending表、block表和 handler表,而它们都属于内核数据结构,而这说明进程必须处于内核状态才能对信号做处理,所以结论就是,当进程从内核态返回到用户态的时候,进行信号的检测和处理!
那么用户态什么时候才会陷入内核态呢?一般最常见的就是调用系统调用的时候,这时候操作系统是自动会做“身份切换”的,用户身份变成内核身份,或者反过来。
2. 理解用户态和内核态
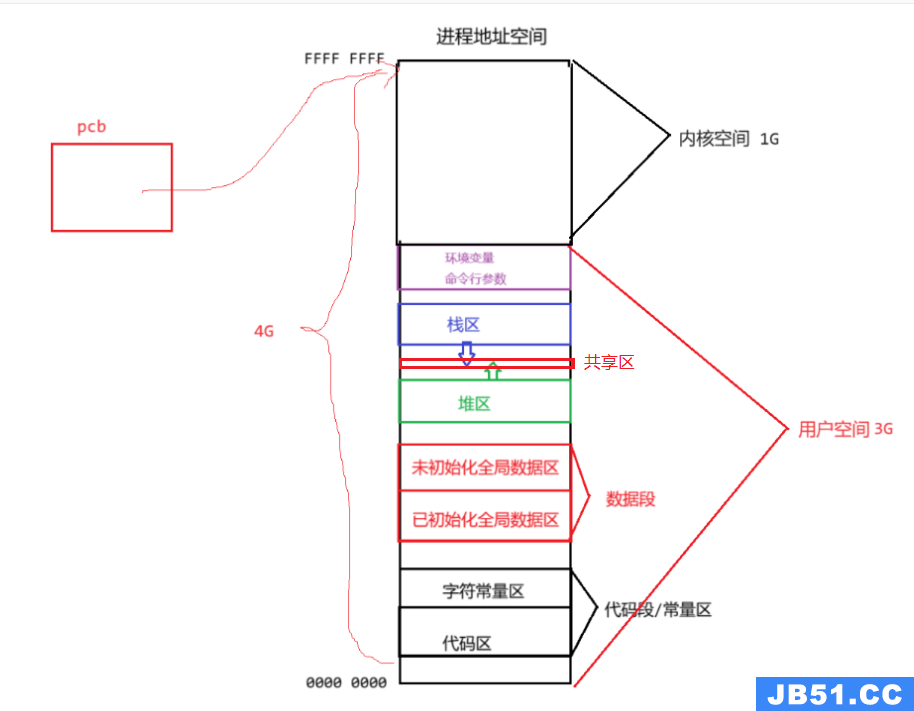
下面我们开始理解用户态和内核态,这时候我们又要回到我们学习过的地址空间了,我们知道,每个进程PCB都有自己的地址空间,而我们以前也讲过,0~3GB 的空间为用户空间,3~4GB 为内核空间,如下图:
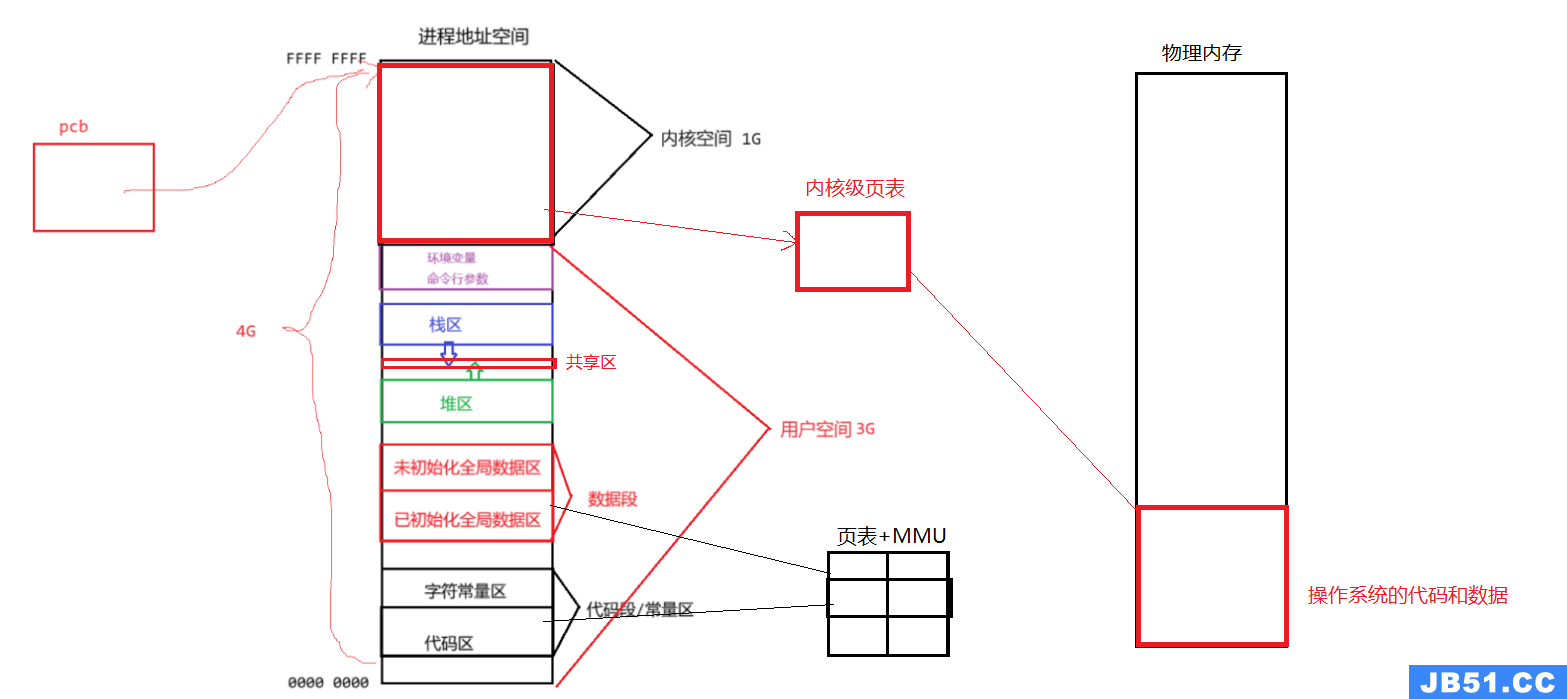
下面我们正式介绍一下内核空间,其实内核空间中映射的就是操作系统的代码和数据。由于操作系统是被计算机最先加载的软件,所以一般操作系统被加载的时候,它的代码和数据是被加载到靠内存的底侧的位置,那么内核空间怎么和操作系统的代码和数据建立映射呢?没错,它们之间还有一个内核级的页表!但是其实内核空间可以直接和物理内存建立映射,它就是固定的偏移量,用其中的地址减去3GB就可以得到,但是我们先不谈这种方式。
也就是说用户有用户级的页表映射到物理内存中,内核有自己的内核级页表映射到操作系统的代码和数据。那么当系统中有许多进程的话,有几个进程就有几份页表,因为进程之间具有独立性!但是内核级页表只有一份!所以所有进程的 3~4GB 的内核空间,和内核级页表,还有映射的操作系统的代码和数据,都是一样的!也就是说,在整个系统中,进程再怎么切换,3~4GB 的空间内容是不变的!
所以站在进程角度,所有的系统调用都在内核空间中,被进程所看到,所以每一个进程在调用系统调用时,在代码区调用,就可以相当于在自己的地址空间里面调用该方法,调用完成之后再返回自己的代码区中,就如同在自己的地址空间里直接调用!
那么站在操作系统角度,任何一个时刻,都有进程在执行。因为操作系统在我们开机的时候已经启动了,说明操作系统本身也是一个进程,那么它也要自己的地址空间,它甚至可以不要用户的空间,只要自己的内核空间。那么只要有进程在执行,我们想执行操作系统的代码,就可以随时执行!
其实操作系统的本质就是基于时钟中断的一个死循环。在计算机硬件中,有一个时钟芯片,在每一个非常短的时间内,会向CPU发送时钟中断;而CPU接收到了中断,就要执行该中断所对应的方法,这个中断所对应的方法就是操作系统的代码,相当于这个时钟中断在推动操作系统在运行!
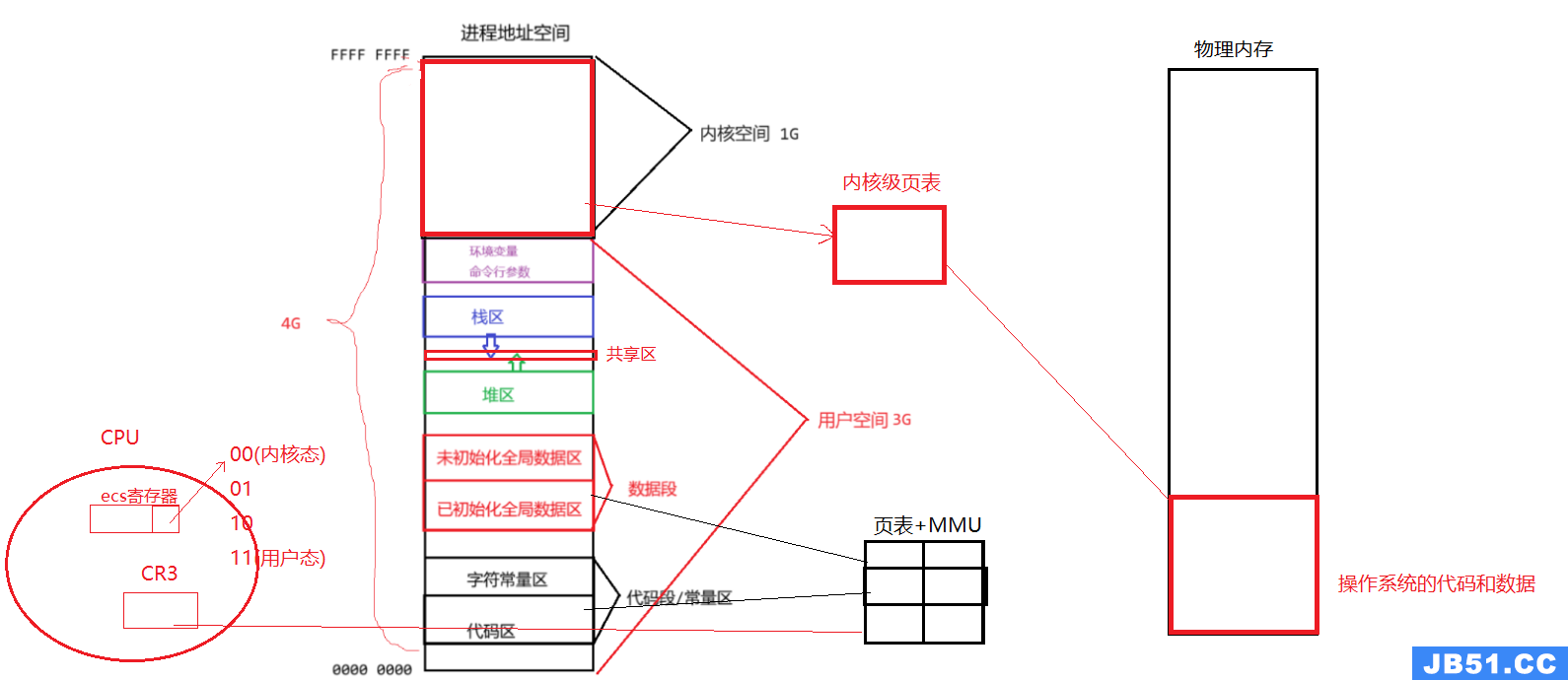
那么我们再回到地址空间中,我们以前在进程中调用自己的方法或者代码,都是在用户区调的,但是当我们需要调用操作系统的代码,并不是我们想调就调的,因为用户无法直接访问操作系统!那么我们就要再介绍CPU了,在CPU中有一个叫做CR3的寄存器,这个寄存器直接指向的就是当前进程所对应的用户级页表,当进程被调度的时候,该进程的用户级页表的地址就会被放在这个寄存器中,这里保存的是物理地址。
我们怎么知道当前访问的是用户态还是内核态呢?那么,在CPU中还有一个寄存器叫做ecs寄存器,当我们执行用户态的代码的时候,ecs寄存器一定指向的是用户态的代码;如果我们切换到了内核,它就会指向内核中的代码;而在ecs寄存器里它的最低两个比特位,记录的是CPU的工作模式,其中CPU常见的工作模式有用户态和内核态,我们知道两个比特位一共就四种状态,那么它内部就是用 00(0) 和 11(3) 分别代表内核态和用户态。也就是说,如果我们想访问内核中的代码,我们必须要将ecs寄存器中的低两位由 11 设为 00,就变成内核态了,我们就可以访问操作系统的数据了!那么谁能修改ecs寄存器呢?所以CPU必须给我们提供一个方法,能够改变CPU的工作级别,于是就有了 int 80,这其实是一个汇编语句,意思就是陷入内核!
所以我们就能理解什么是用户态,什么是内核态了。其中,
- 内核态:允许访问操作系统的代码和数据
- 用户态:只能访问用户自己的代码和数据
3. 信号的捕捉
我们理解了内核态和用户态之后,我们下面结合下图来理解信号的捕捉:
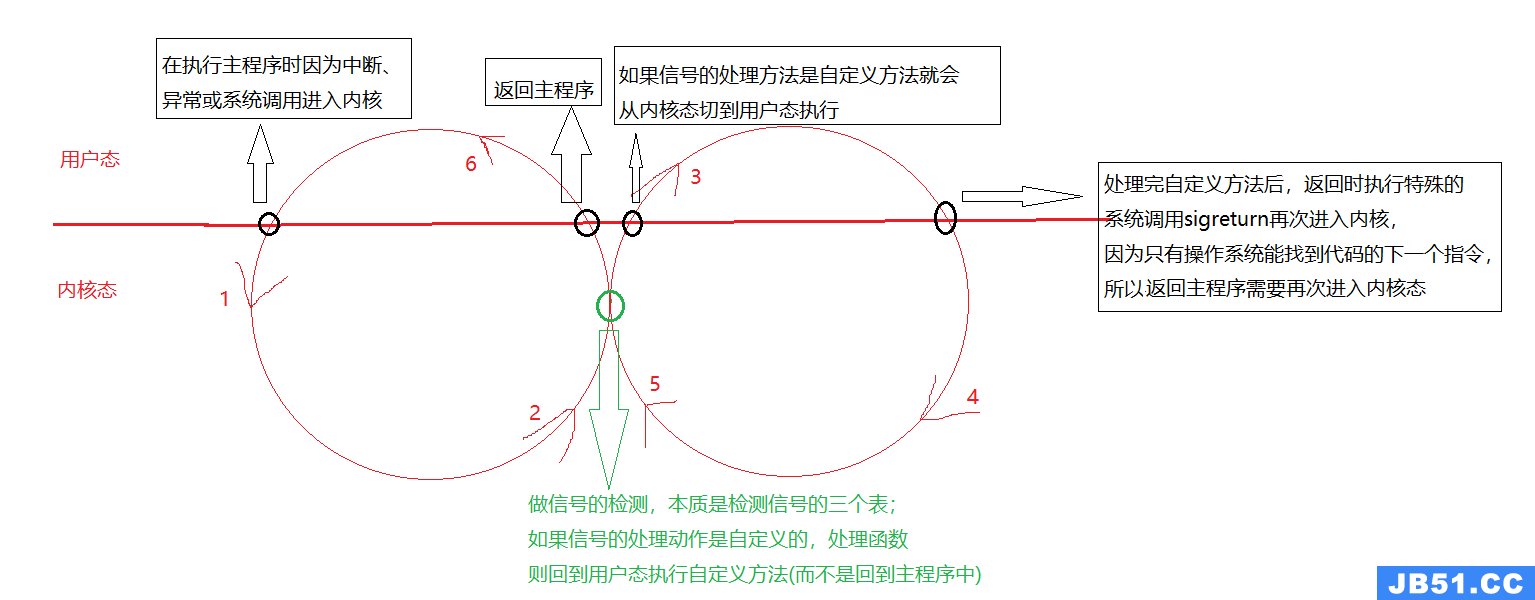
所以信号保存是为了让进程在合适的时候处理,那么信号是在内核态返回用户态时进行处理的!
4. 系统调用
(1)sigaction()
我们前面已经知道信号捕捉可以使用 signal(),那么除了 signal() 之外,还有一个系统调用接口:
int sigaction(int signum,const struct sigaction *act,struct sigaction *oldact);

sigaction() 的功能也是捕捉特定信号,和 signal() 功能一模一样。它的第一个参数是信号的编号;第二个参数和第三个参数的类型是一样的,都是 struct sigaction*,而第二个参数是输入型参数,它是把我们用户设置的自定义捕捉方法以及其它信息,通过 act 传递给操作系统;第三个参数 oldact 就是输出型参数,就是将旧的方法保存给我们传递出来。
下面我们看一下 struct sigaction 的结构体:
struct sigaction {
void (*sa_handler)(int);
void (*sa_sigaction)(int,siginfo_t *,void *);
sigset_t sa_mask;
int sa_flags;
void (*sa_restorer)(void);
};
以上的五个字段中,我们只需要知道第一个字段 sa_handler 和第三个字段 sa_mask 即可,其它都是与实时信号有关的字段,我们不用关心。
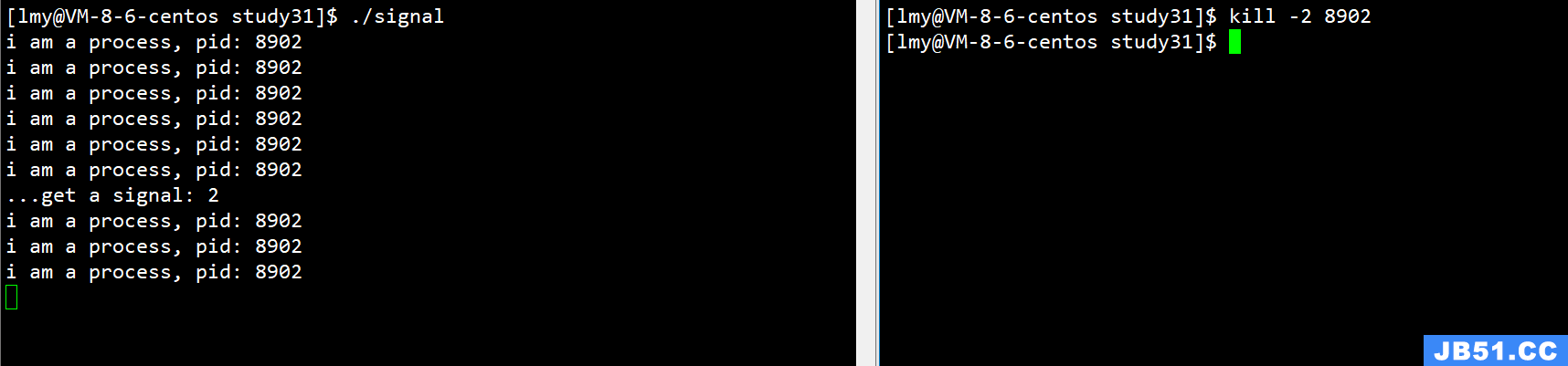
例如我们使用如下代码进行测试:
void myhandler(int signo)
{
cout << "...get a signal: " << signo << endl;
}
int main()
{
struct sigaction act,oact;
memset(&act,sizeof(act));
memset(&oact,sizeof(oact));
act.sa_handler = myhandler;
sigaction(2,&act,&oact);
while(1)
{
cout << "i am a process,pid: " << getpid() << endl;
sleep(1);
}
return 0;
}
(2)pending 表的置0顺序
下面我们说一下,当进程收到一个信号,pending 位图对应的位置变成1,那么它是在执行对应方法前由1置0还是在执行对应方法后由1置0呢?
我们可以在执行捕捉方法时,打印 pending 表,观察 pending 表在执行捕捉方法时对应的位置是否已经置0,如果已经置0,说明是在执行捕捉方法前由1置0,否则相反,下面我们验证一下:
void PrintPending()
{
sigset_t sigset;
sigpending(&sigset);
for(int signo = 31; signo >= 1; signo--)
{
if(sigismember(&sigset,signo))
cout << "1";
else
cout << "0";
}
cout << ",";
}
void myhandler(int signo)
{
PrintPending();
cout << "...get a signal: " << signo << endl;
}
int main()
{
struct sigaction act,pid: " << getpid() << endl;
sleep(1);
}
return 0;
}
结果如下:

如上,说明一旦收到信号时 pending 表的对应位置置,一旦进行信号递达时,先将 pending 表的对应位置由1置0,再执行方法。
(3)struct sigaction 中的 sa_mask 字段
当某个信号的处理函数被调用时,内核自动将当前信号加入进程的信号屏蔽字,当信号处理函数返回时自动恢复原来的信号屏蔽字,这样就保证了在处理某个信号时,如果这种信号再次产生,那么它会被阻塞到当前信号处理结束为止。也就是说,不允许同一个信号不断向一个进程发送,使进程不断执行该信号的处理函数。
下面我们也可以验证一下,我们只需要将上面代码的自定义处理方法修改一下即可,我们在 myhandler 中写个死循环打印 pending表,这样就能让2号信号一直在处理了,这时候我们再给进程发送2号信号,这时候2号信号位置的 pending 表应该变成1,如下代码:
void myhandler(int signo)
{
cout << "...get a signal: " << signo << endl;
while(1)
{
PrintPending();
sleep(1);
}
}
结果如下:
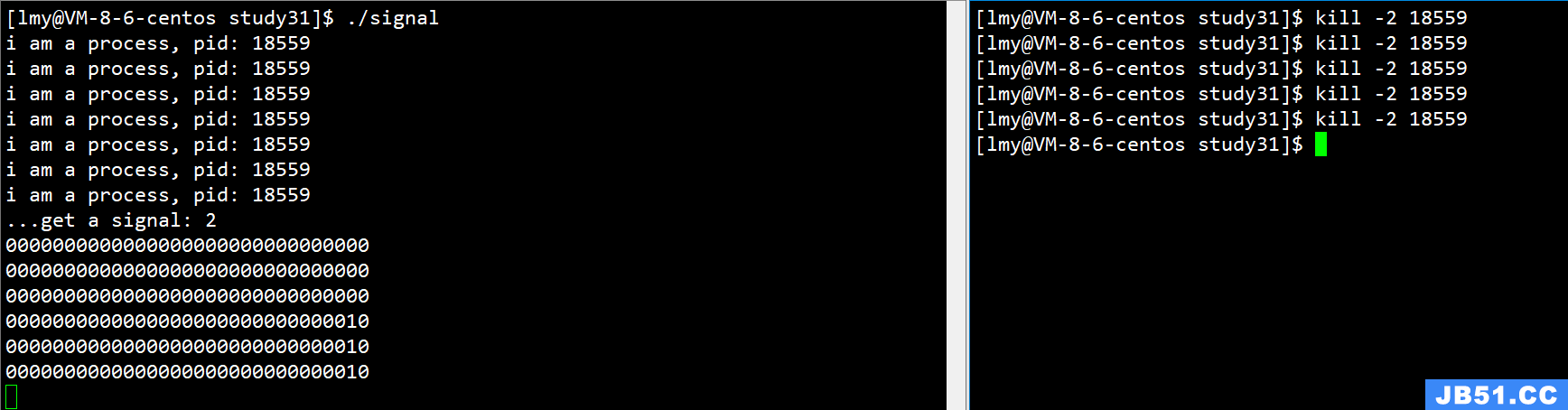
那么 struct sigaction 中的 sa_mask 字段是用来干什么的呢?正如我们上面所说,如果正在处理2号信号,2号信号会被屏蔽,那么如果还希望自动屏蔽另外一些信号,则用 sa_mask 字段说明这些需要额外屏蔽的信号,当信号处理函数返回时会自动恢复原来的信号屏蔽字。
我们在给 sa_mask 字段说明需要屏蔽哪些信号时,需要使用 sigaddset 设置信号集,然后往 sa_mask 中设置即可,例如,添加屏蔽3号信号:
sigaddset(&act.sa_mask,3);
三、信号扩展
1. 可重入函数
当我们进行链表插入时,假设插入节点 node1,insert 分为两个步骤,先连接 next 指针,再更新 head 指针,那么如果我们在刚刚完成第一步的时候,因为硬件中断等原因使进程切换到内核,再次回用户态之前检查到有信号待处理,于是就去处理该信号,而该信号的处理方法又是自定处理方法,该方法就是再插入一个节点 node2,那么该方法执行完毕后返回用户态,此时的 head 指向 node2。然后继续回到插入 node1 的代码中完成剩下的代码,最后 head 指向了 node1,此时 node2 发生节点丢失,内存泄漏!如下图:

更形象的图如下:

像上例这样,insert 函数被不同的控制流程调用,有可能在第一次调用还没返回时就再次进入该函数,这称为重入,insert 函数访问一个全局链表,有可能因为重入而造成错乱,像这样的函数称为不可重入函数;反之,如果一个函数只访问自己的局部变量或参数,则称为可重入(Reentrant) 函数。
2. volatile
该关键字在 C++ 当中的类型转换我们已经有所涉猎,今天我们站在信号的角度重新理解一下。
我们先看以下代码,定义一个全局的 flag,然后在 main 函数中以 flag 为恒真条件执行死循环,最后打印一语句,我们知道,这种情况下该语句是不会被打印的:
int flag = 1;
int main()
{
while(flag);
cout << "process quit!" << endl;
return 0;
}
我们只能通过 ctrl + c 发送2号信号终止该进程:

但是今天我们可以使用信号捕捉,对2号信号自定义方法中将 flag 的值修改为1,这样就可以让主程序跳出死循环,从而打印该语句了,如下:
int flag = 1;
void myhandler(int signo)
{
flag = 0;
}
int main()
{
signal(2,myhandler);
while(flag);
cout << "process quit!" << endl;
return 0;
}
结果如下:

但是如果在优化条件下,当编译器检测到我们的 flag 在主程序中并没有被修改的时候,flag 变量可能被直接优化到 CPU 内的寄存器中,即每次读取 flag 的数据的时候,只在 CPU 中读取,但是 flag 在内存中也有对应的空间,当我们使用信号捕捉修改 flag 的值时,只会修改内存中的 flag 的值,不会影响 CPU 中的 flag 的值!
那么这个优化条件怎么设置呢?在 g++ 下,这种优化条件一般是被关闭的,需要在编译时加上选项设置,那么在 g++ 中设置这种优化条件的选项为 g++ -O1,其中 O1、O2、O3 都可以,我们可以验证一下:
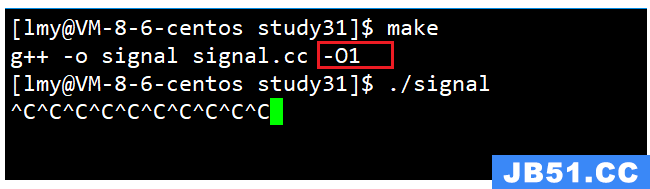
如上,我们捕捉2号信号将 flag 修改为 0 也无法终止死循环,因为此时被优化后是直接从 CPU 中读取 flag 的值了。
那么如果此时我们想关闭这种优化,我们就可以在 flag 前加上 volatile 关键字,如下:
volatile int flag = 1;

所以加上 volatile 关键字就是为了防止编译器过度优化,保持内存的可见性!
3. SIGCHLD 信号
我们在进程控制的时候讲过用 wait 和 waitpid 函数清理僵尸进程,父进程可以阻塞等待子进程结束,也可以非阻塞地查询是否有子进程结束等待清理(也就是轮询的方式)。采用第一种方式,父进程阻塞了就不能处理自己的工作了;采用第二种方式,父进程在处理自己的工作的同时还要记得时不时地轮询一 下,程序实现复杂。
其实,子进程在终止时会给父进程发 SIGCHLD 信号,也就是 17 号信号,该信号的默认处理动作是忽略,父进程可以自定义 SIGCHLD 信号的处理函数,这样父进程只需专心处理自己的工作,不必关心子进程了,子进程终止时会通知父进程,父进程在信号处理函数中调用 wait 清理子进程即可。
但是由于 UNIX 的历史原因,要想不产生僵尸进程还有另外一种办法:父进程调用 sigaction 或者 signal 将 SIGCHLD 的处理动作置为 SIG_IGN,也就是忽略,这样 fork 出来的子进程在终止时会自动清理掉,不会产生僵尸进程,也不会通知父进程。
但是上面不是说该信号的默认处理动作是忽略的吗?为什么还要我们自己使用系统接口处理呢?其实系统对于17号信号的默认处理动作是 SIG_DFL,也就是使用默认处理动作,只不过 SIG_DFL 默认执行的动作是忽略!而我们自己使用接口设置的 SIG_IGN 就是直接将默认处理动作设置为忽略!还记得我们上一节讲的,信号的处理方式有三种:默认动作、忽略、自定义动作 吗?其中 SIG_DFL 就是默认动作,SIG_IGN 就是忽略!
原文地址:https://blog.csdn.net/YoungMLet/article/details/135920287
版权声明:本文内容由互联网用户自发贡献,该文观点与技术仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请发送邮件至 dio@foxmail.com 举报,一经查实,本站将立刻删除。